지난 307화 『부품 부족 그리고 ‘윙락(Wing rock)’결함으로 개발 지연되고 있는 T-7A 레드호크가 남긴 교훈과 T-50, FA-50의 미래!』 편을 업로드 한 이후 제가 조언을 구했던 항공 전문가에게서 연락이 왔습니다.
제가 부족하게 이해하고 있었던 부분을 지적한 뒤 조금 더 보충 설명을 해주시더라고요. 항공역학(Aerodynamics) 분야에 대한 제반 지식이 부족한데다 이를 쉽게 풀어 설명하는 자료들도 찾기 힘들다 보니 사실 이해하기가 쉽지 않았습니다. 그래서 짧지만 전문가가 생각하는 T-7A 레드호크의 윙락 결함을 해결하기가 쉽지 않은 이유에 대해 보충하는 영상을 만들어 보았습니다.
4세대 전투기의 전형이라고 불리며 최첨단 공기역학 기술과 항전장비를 적용하여 과거 미국이 실전 배치한 어떤 전투기보다도 가볍고 날렵한 고기동성 전투기가 바로 F-16이었습니다.

F-16의 기수와 날개(주익)이 연결되는 부위를 자세히 살펴 보면 작은 날개처럼 생긴 부분을 볼 수 있는데 이것이 바로 스트레이크(Strake)이며 ‘곁날개’ 정도로 해석될 수 있습니다.
스트레이크는 기수 부분(Nose)에 발생하는 공기저항은 감소시키고 반대로 동체 앞부분의 양력을 증가시켜 고받음각에서도 안정된 비행을 가능하게 만드는 역할을 합니다. 특히 F-16처럼 비교적 넓은 면적의 주익에 스트레이크까지 결합되면 선회 성능까지 좋아져서 전체적인 기동성도 증가하게 되죠
T-50 스트레이크에 대한 연구 사진에서도 알 수 있듯이 스트레이크의 각도와 크기를 어떻게 설정하는가에 따라 날개(주익)에 부딪치는 Vortex(소용돌이/와류)의 흐름이 달라지게 됩니다.
그런데 특정 각도(Angle of Attack: AOA)로 기수를 들어올리게 되면 동체 앞부분과 스트레이크를 통해 발생한 와류와 주익에서 발생하는 와류가 서로 간섭을 일으켜 전투기가 흔들리는 롤링(rolling)현상을 일으키게 됩니다. 이를 윙락(wing-rock) 현상이라 부르며 적기를 조준하기도 어렵게 되지만 자칫 기체가 통제 불능 상태로 빠져들 수도 있는 위험이 있습니다. 따라서 스트레이크를 통과한 와류와 주익에서 발생하는 와류를 어떻게 간섭하지 않게 만들 것인가가 문제의 핵심이 됩니다.
윙락으로 인한 롤링 현상 https://youtu.be/xes7Ry-URio
여러 가지 이유로 항공기의 주 날개(주익)들은 형태를 변화시킬 수 있는 가변 캠버(variable camber) 방식을 채택하고 있습니다.
비행기를 타고 날개 쪽에 앉으면 이륙하기 전 날개가 펴지면서 길어지는 모습을 볼 수가 있는데요. 이렇게 날개 앞부분(Leading edge)과 뒷부분(trailing edge)에 장착된 플래퍼론(flaperon)을 조절함으로써 캠버(camber: 날개의 단면 중심선의 휨 정도)의 크기를 변환할 수 있도록 만든 방식이 바로 가변 캠버인 것입니다.
캠버가 커질수록 양력이 증가하는 반면 공기저항도 늘어나며, 작으면 공기저항이 줄어드는 대신 양력도 감소하게 됩니다. 전투기동 시처럼 고속비행을 해야 할 때는 공기저항이 작아야 하고 이륙과 착륙 시처럼 저속비행을 할 때는 양력이 커야만 하는데, Fly By Wire 같은 전자식 조종계통이 비행 특성에 따라 이를 판단한 뒤 플래퍼론을 조작하여 캠버의 크기를 변환함으로써 양력과 공기저항을 조절하게 되는 것이죠.
이런 이유로 고받음각에서 윙락(wing rock) 현상이 발생했을 때 스트레이크(Strake)나 플래퍼론(Flaperon) 같은 기계적 장치가 필요함과 동시에 플래퍼론을 통제하여 캠버를 조절해 줄 수 있는 비행제어 소프트웨어 역시 필요해진다는 뜻입니다.
이제 본론으로 들어가게 되는데 T-7A와 유사한 형태를 지니고 있고 비슷한 비행 특성을 지닌 것으로 널리 알려져 있는 F/A-18 E/F 슈퍼호넷의 경우 날개 앞부분(Leading Edge)에 장착된 플래퍼론의 크기가 날개의 반 이상을 차지하고 있습니다.
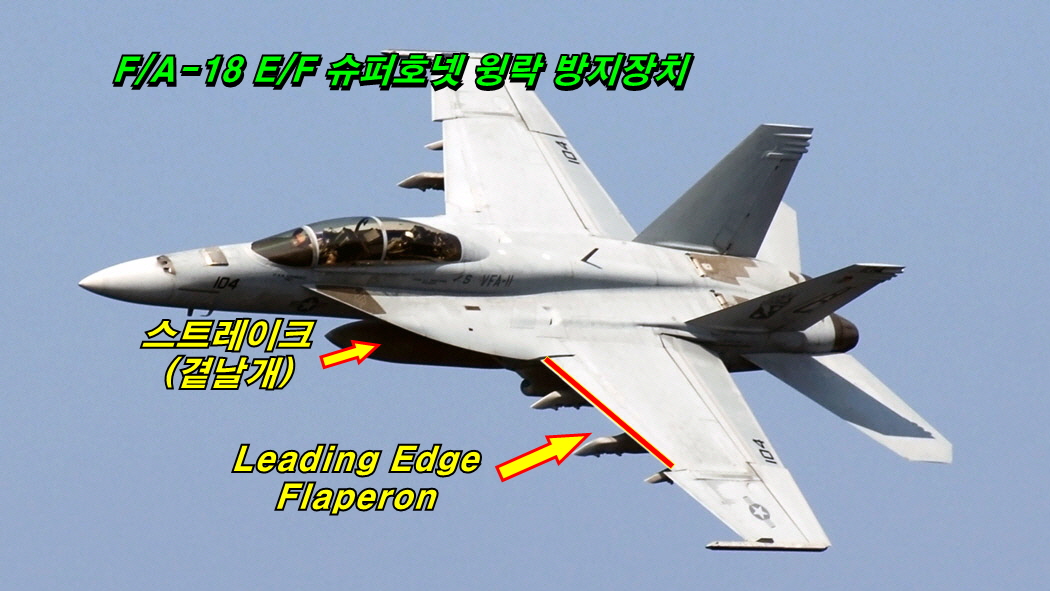
하지만 T-7A의 경우 날개 앞부분(Leading Edge)에 장착된 플래퍼론의 크기가 날개의 반 크기도 되지 않죠.

제가 조언을 요청했던 한국항공우주산업 KAI 전문가의 개인 의견은 다음과 같이 정리가 됩니다.
『T-7A Wing Rock 결함 해결법은 LEF(Leading edge Flaperon)의 각도를 조절해서 캠버(wing airfoil)형상을 변화시켜 기체 기수에서 발생한 와류와 주익(wing)에서 발생한 와류가 겹치지 않는 받음각(AOA)과 LEF각도를 찾아내는 것이다. 물론 이 역할은 비행제어 컴퓨터가 맡아야 할 것이고 이는 결국 비행 소프트웨어로 조절하는 값을 찾는다는 뜻이다. 보잉이 말하고 있는 소프트웨어로 윙락을 해결하겠다는 말은 이런 관점으로 이해할 수 있다.
하지만 문제는 T-7A의 Leading edge Flaperon의 길이를 슈퍼호넷의 그것과 비교해 보면 확연하게 짧으며 이는 명백하게 슈퍼호넷과 다른 점이다. 플래퍼론이 길면 그만큼 추가적인 설계 및 동력계통이 필요하고 이는 곧 비용과 개발기간의 연장으로 연결된다.
아마도 보잉은 그러한 이유로 비행 소프트웨어 업그레이드만 언급하고 있는 듯 한데 아무리 소프트웨어가 뛰어나도 Leading edge Flaperon 자체가 담당하는 물리적 와류 통제 기능을 대신할 수는 없으며 따라서 Leading edge Flaperon의 재설계 없이는 설사 윙락 현상을 해결한다 하더라도 T-7A의 비행성능에 상당한 제한을 가하게 될 것이다.』
T-7A 레드호크의 윙락 문제 해결이 왜 쉽지 않은지, 문제가 해결된다 하더라도 형상 재설계가 없는 한 성능에 상당한 제한이 가해질 수 밖에 없는 이유에 대해 전문가의 설명을 듣고 제가 이해한 범위 내에서 여러분들께 소개해 드렸습니다. 혹시 부족한 점이 있었다면 많은 양해 부탁 드리겠습니다.
이 포스팅을 유튜브 영상으로 보고 싶다면? https://youtu.be/oByofAk7bz4



